Eine künstlerische Darstellung einer Landefähre auf dem Jupitermond Europa (Bildnachweis: NASA)
Künstliche Intelligenz wird entwickelt, um ein Robotergehirn für eine zukünftige NASA-Mission zur Landung auf der eisigen Oberfläche eines der Ozeanmonde des Sonnensystems, wie Europa oder Enceladus, bereitzustellen.
Die autonome Software wird von Forscherteams entwickelt, die am Jet Propulsion Laboratory (JPL) bzw. am Ames Research Center der NASA einen Roboterarm, der dem eines Landers oder Rovers nachempfunden ist, und eine Virtual-Reality-Simulation nutzen.
Stellen Sie sich vor, Sie sind ein Landeroboter, der den Jupitermond Europa erforschen soll, der weit unter seiner eisigen Oberfläche einen tiefen Wasserozean beherbergt. Sie haben die Strahlungsgürtel des Riesenplaneten durchquert, Ihre Bremsraketen haben gezündet und Sie sind sicher auf dem Eis gelandet. Nur – vielleicht ist das Terrain gefährlicher, als Sie dachten, mit großen Eisbrocken oder tiefen Schluchten. Vielleicht sind die Eigenschaften des Eises hier anders – härter oder dünner oder durch Mikrometeoriteneinschläge zerbrochen.
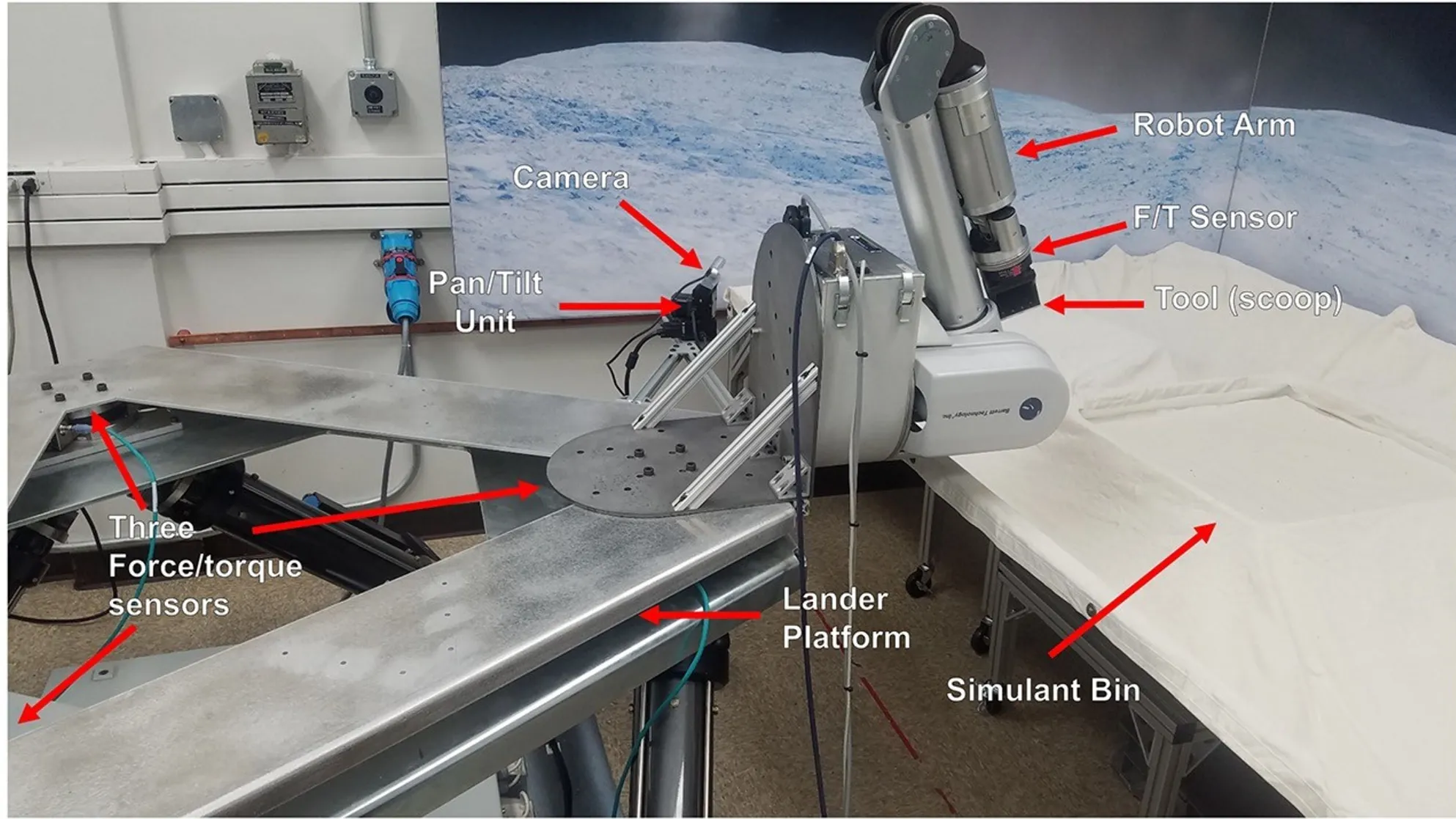
Der OWLAT-Roboterarm im Jet Propulsion Laboratory der NASA in Südkalifornien. (Bildnachweis: NASA/JPL-Caltech)
Sie versuchen, eine Probe zu entnehmen, aber Ihre Schaufel bleibt irgendwo hängen, oder Ihr Bohrer steckt im Eis fest. Sie haben ein Problem – und je nachdem, wo sich Erde und Jupiter in ihren jeweiligen Umlaufbahnen befinden, kann es bis zu 53 Minuten dauern, bis Ihr Team auf der Erde etwas davon erfährt, und bestenfalls weitere 53 Minuten, wahrscheinlich sogar länger, bevor es Ihnen Befehle erteilt. Bis dahin könnte Ihr Bohrer kaputt sein, oder Sie könnten in eine Schlucht gestürzt sein. Wie viel besser wäre es für Ihr Überleben, wenn Sie einige Entscheidungen selbst treffen könnten?
Das hoffen Ingenieure und Planetenforscher der NASA mit zwei von der Behörde finanzierten Programmen zu erreichen, die darauf abzielen, autonome Software zu entwickeln, die mithilfe von maschinellem Lernen, logischem Denken und generativer künstlicher Intelligenz für künftige Lander- und Rover-Missionen zu den Ozeanmonden trainiert wird.
Diese Programme sind das Ocean Worlds Lander Autonomy Testbed (OWLAT), ein Roboteraufbau am JPL, und das Ocean Worlds Autonomy Testbed for Exploration, Research and Simulation (OceanWATERS), ein reines Virtual-Reality-Tool bei der NASA Ames
OWLAT sitzt in der Ecke eines Büros am JPL, nur ein Roboterarm auf einem Prüfstand vor einem Wandgemälde eines Künstlers, das die raue, gefrorene Oberfläche eines Ozeanmondes zeigt. OWLAT wurde entwickelt, um physikalisch nachzubilden, wie ein Roboterarm in der Umgebung mit geringer Schwerkraft auf einem dieser Monde arbeiten könnte. Mit dem Arm können die Ingenieure simulieren, wie sie Material von der Oberfläche schöpfen, bohren oder in das Eis eindringen. Außerdem können sie die Eigenschaften des Eises messen, indem sie einen Scherdurchmesser (der die Fähigkeit einer Oberfläche beurteilt, die Last eines Radfahrzeugs darauf zu tragen) oder eine Drucksenkungsplatte (die misst, wie stark der Boden bei Druckeinwirkung sinkt) verwenden.
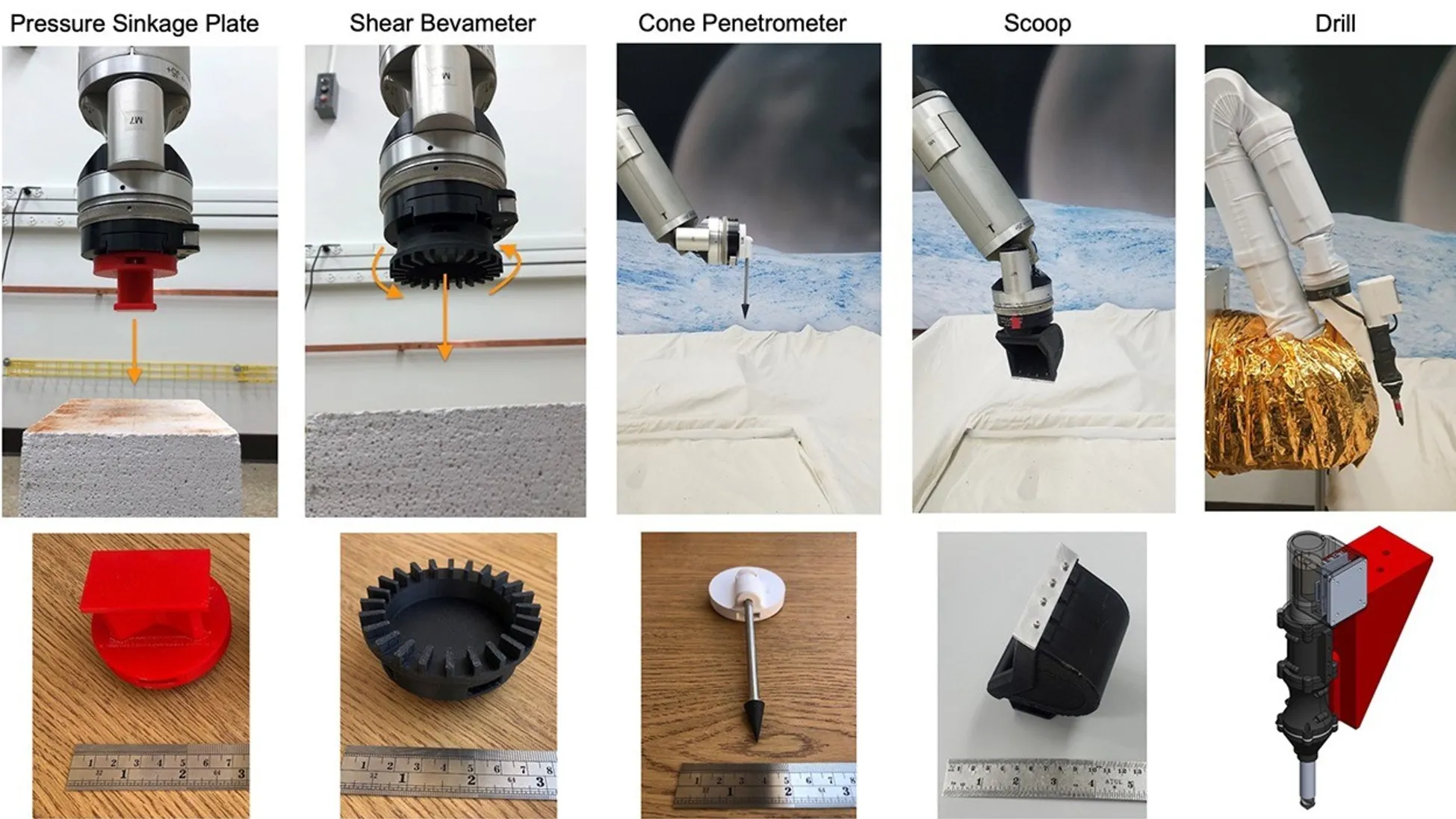
Die verschiedenen Werkzeuge, die am Ende des OWLAT-Roboterarms befestigt werden können (Bildnachweis: NASA/JPL-Caltech)
Der Arm ist mit einer Schwenk- und Neigekamera ausgestattet, um zu überprüfen, was die Werkzeuge gemacht haben, und verfügt über sieben Freiheitsgrade, die es dem Arm ermöglichen, komplexe Bewegungen auszuführen. Eingebaute Kraft- und Drehmomentsensoren messen die Bewegungen und Reaktionen des Arms und leiten sie an das Roboterbetriebssystem weiter. Die Forscher können Fehler, technische Ausfälle und Gefahren simulieren, um zu sehen, wie die autonome Software des Arms auf Probleme reagiert, ohne dass sie Hilfe von zu Hause benötigen.
OceanWATERs macht das Gleiche, allerdings in virtueller Realität und mit einem kompletten Lander, der auf einer Designstudie aus dem Jahr 2016 basiert, und nicht nur mit einem Roboterarm. Für die Simulation kann eine Vielzahl von detaillierten Geländemodellen ausgewählt werden, nicht nur Variationen von Eismonden, sondern auch die Atacama-Wüste in Chile, die oft als Ersatz für eine trostlose Umgebung verwendet wird. Dank des GSAP-Tools (Generic Software Architecture for Prognostics) von OceanWATERS kann die Simulation unter anderem die Batterieleistung modellieren: wie viel Energie der Lander bei bestimmten Aktionen verbraucht und wie viel Lebensdauer die Batterie noch hat.
Sowohl OWLAT als auch OceanWATERs basieren auf demselben Roboterbetriebssystem, einer autonomen Software, die Telemetriedaten von den Robotersensoren empfängt und daraufhin Befehle erteilt. Mit Hilfe des Roboterbetriebssystems können verschiedene Missionsziele simuliert werden, und eine auf KI basierende Fehlerkorrektur-Software kann Probleme beheben, wenn sie auftreten.
Fehlererkennung und -vermeidung standen im Mittelpunkt der jüngsten Forschungsarbeiten von sechs Teams, die alle OceanWATERS und drei davon auch OWLAT einsetzten, um die Entwicklung von Software voranzutreiben, die eines Tages tatsächlich auf einem Lander auf einem Eismond im Ozean eingesetzt werden könnte. So konnten sie beispielsweise die Software für die Entscheidungsfindung verbessern, indem sie sie mit Techniken des verstärkten Lernens trainierten, eine automatische Planung entwickeln, die ein Lander einsetzen könnte, um im Falle einer Unterbrechung der Kommunikation mit der Erde so viel Wissenschaft wie möglich zu betreiben, und eine Software schreiben, die in der Lage ist, sich autonom anzupassen, wenn das Gelände, auf dem er landet oder in das er eindringt, nicht den Erwartungen entspricht und eine gewisse Anpassung erfordert.

OWLAT am JPL. (Bildnachweis: NASA/JPL-Caltech)
Es gibt eine Reihe großer, eisiger Monde im äußeren Sonnensystem, und man nimmt an, dass viele von ihnen Ozeane enthalten, so dass es keinen Mangel an Zielen für einen zukünftigen Lander gibt.
Zurzeit sind Europa und der Saturntrabant Enceladus die Hauptziele, vor allem weil sie in ihren Ozeanen Leben beherbergen könnten; beim Saturn, der 1,4 Milliarden Kilometer von der Sonne entfernt ist, ist der Zeitabstand noch größer. Dennoch hat die Europäische Weltraumorganisation (ESA) ihre Huygens-Sonde im Januar 2005 erfolgreich auf dem Saturnmond Titan gelandet, so dass eine Landung auf diesen weit entfernten, eisigen Monden möglich ist.
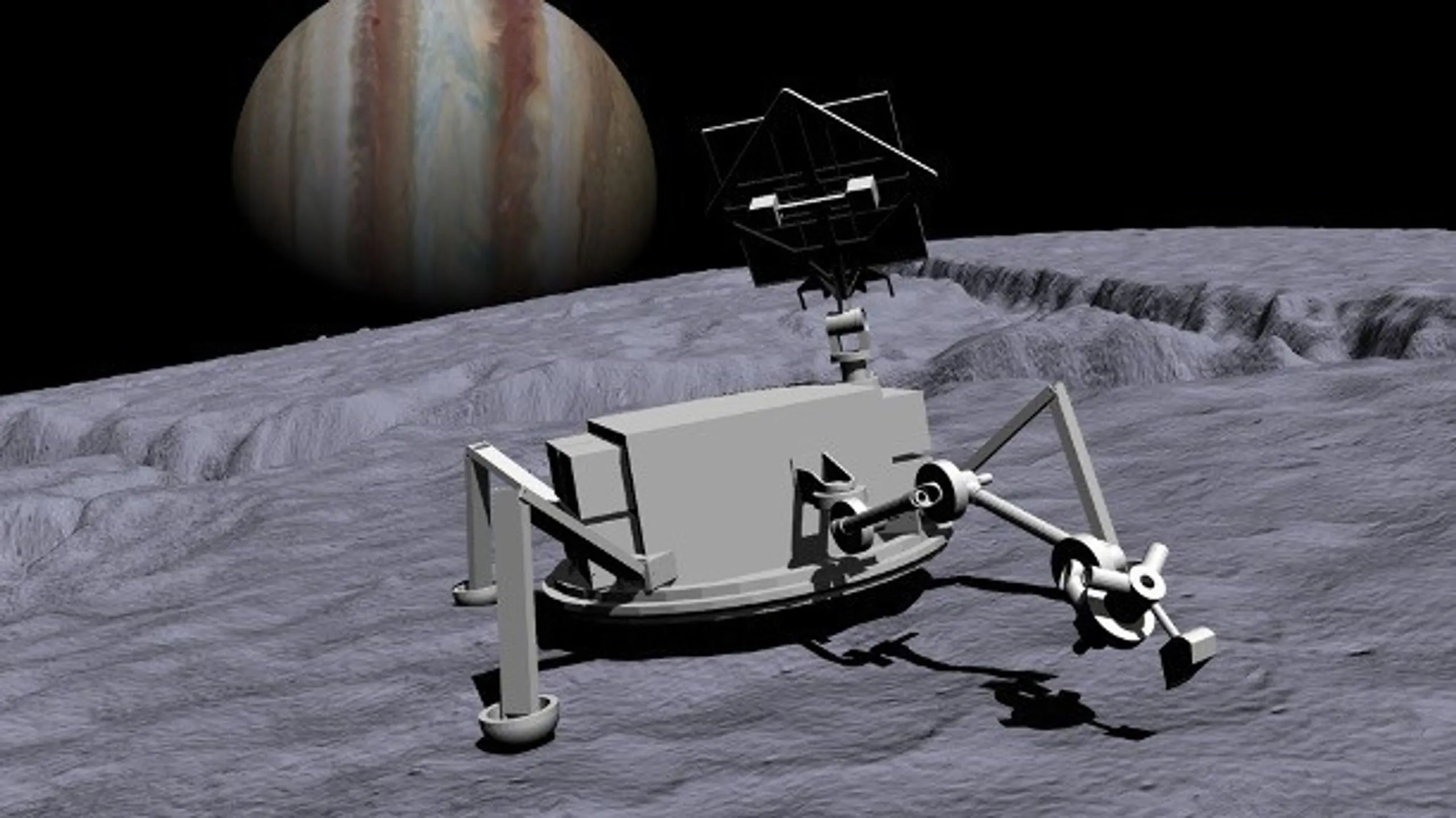
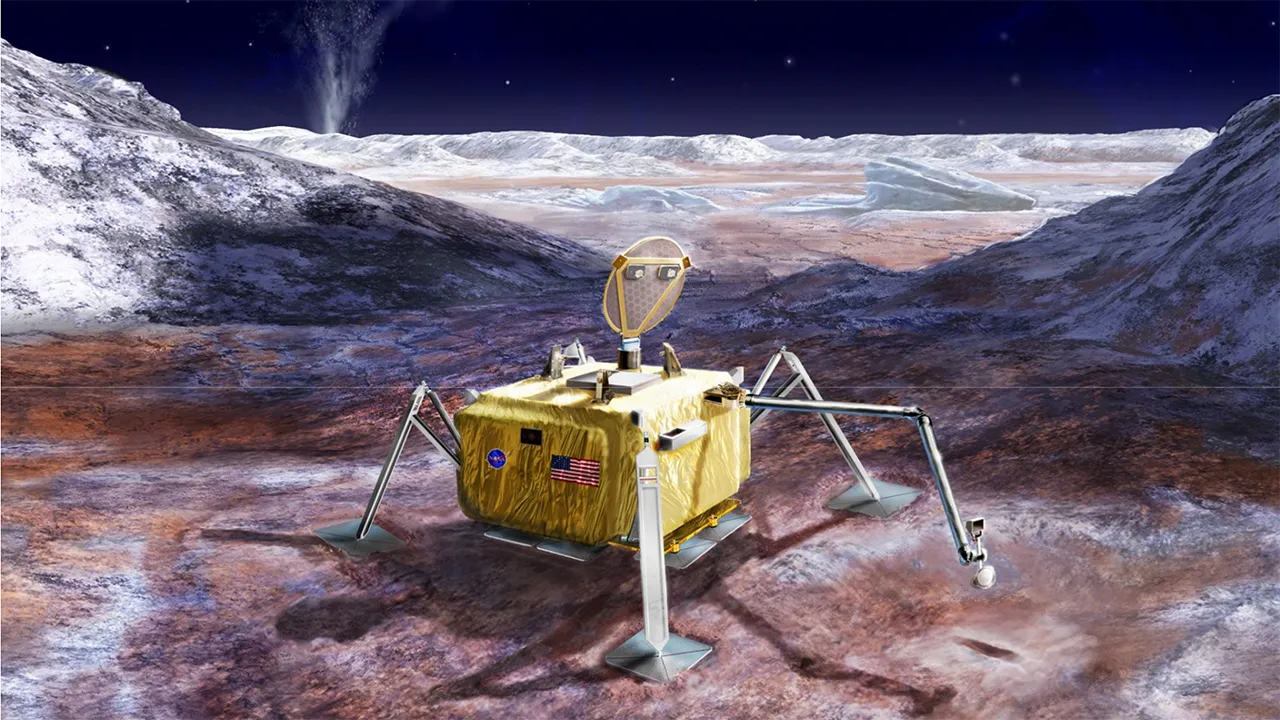
Die OceanWATERS-Simulation eines Eismond-Landers. (Bildnachweis: NASA/Ames Research Center)
Die NASA-Raumsonde Europa Clipper ist nun unterwegs, um den gleichnamigen Jupitermond zu erforschen, während die ESA-Raumsonde Jupiter Icy Moons Explorer (JUICE) ebenfalls unterwegs ist, um zwei Vorbeiflüge an Europa zu unternehmen sowie eingehende Untersuchungen der anderen Galileischen Monde Ganymed und Callisto durchzuführen und schließlich in eine Umlaufbahn um Ganymed einzutreten.
Während weder Europa Clipper noch JUICE landen werden, wird ihre hochauflösende Erkundung dieser Eismonde den Missionsplanern eine viel bessere Vorstellung davon vermitteln, was zu erwarten ist, wenn eine Landemission gestartet wird, und wo die besten Stellen für die Suche nach Beweisen für Leben in diesen fremden Ozeanen sein könnten. Wenn diese Missionen schließlich stattfinden, werden sie die intelligentesten Raumfahrzeuge sein, die jemals gestartet wurden, und ihr Roboter-IQ wird sich bis zu einem Roboterarm in einem Labor und einer Virtual-Reality-Simulation zurückverfolgen lassen.