Künftige Mondrover könnten von der Erde aus ferngesteuert werden.(Bildnachweis: NASA/Daniel Rutter)
Telegesteuerte Rover könnten bald auf dem Mond arbeiten, wobei menschliche Kontrolleure auf der Erde die Werkzeuge der Rover virtuell bedienen könnten, was eine größere Geschicklichkeit bei der Entnahme von Proben, beim Graben oder beim Zusammenbau ermöglichen würde.
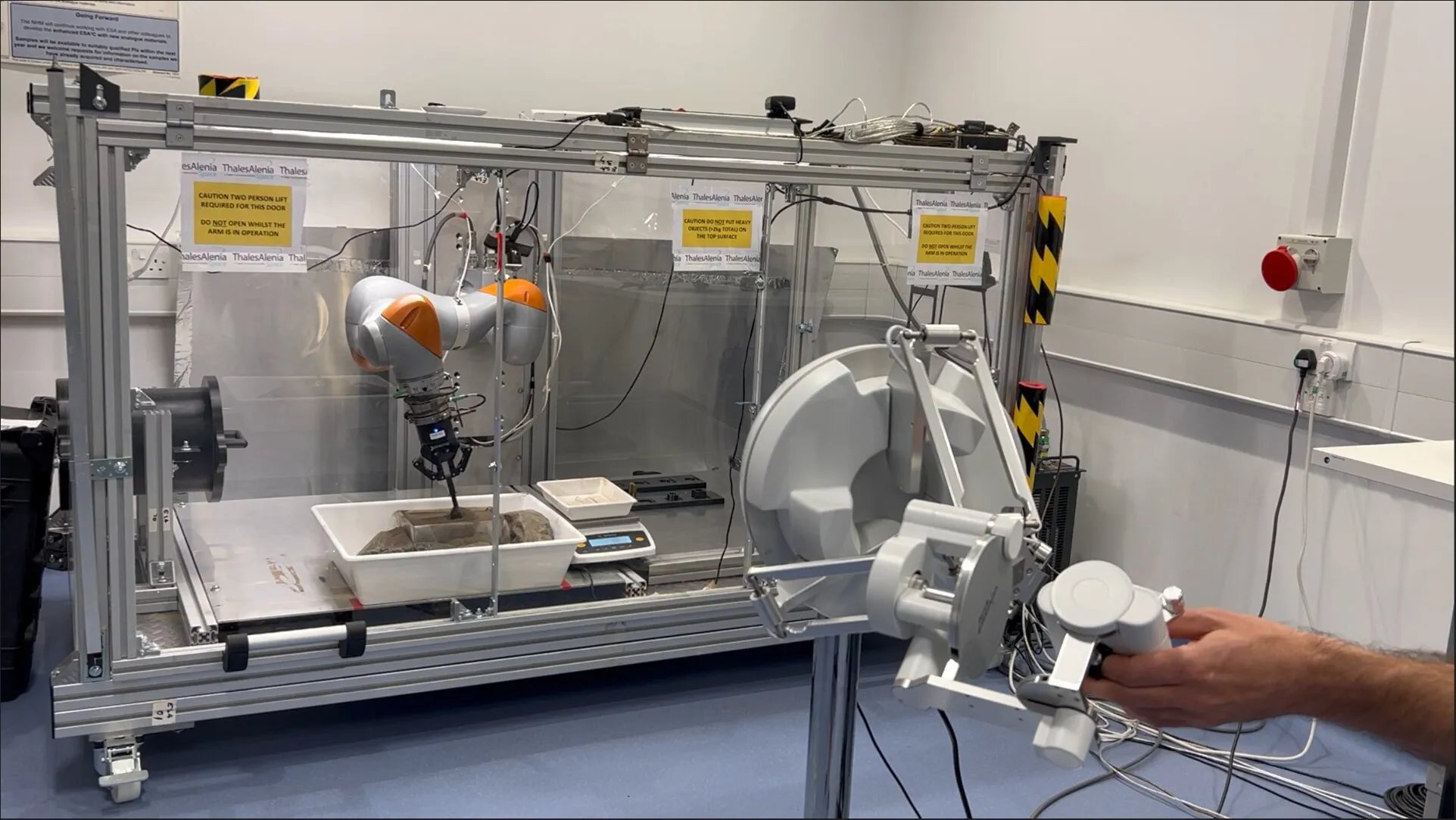
Forscher des Robotiklabors der Universität Bristol in England haben ihr neues Teleoperationssystem im Europäischen Zentrum für Raumfahrtanwendungen und Telekommunikation der Europäischen Weltraumorganisation (ESA) in Harwell in Oxfordshire getestet. Durch die Steuerung einer virtuellen Simulation eines Rovers waren sie in der Lage, einen Roboterarm zu manipulieren, um eine Probe des vorgetäuschten Mondregoliths (Simulant genannt) zu graben. Das Verfahren macht Kameraübertragungen überflüssig, die aufgrund der Zeitverzögerung von 1,3 Sekunden zwischen Erde und Mond verzögert werden können. Die Signale zwischen den Teleoperatoren und den Robotermissionen auf dem Mond könnten in Zukunft von Satelliten des geplanten Moonlight-Projekts der ESA weitergeleitet werden.
„Diese Simulation könnte … uns helfen, Mondroboter von der Erde aus fernzusteuern und das Problem der Signalverzögerungen zu vermeiden“, sagte Joe Louca aus Bristol in einer Erklärung.
Ein ferngesteuertes System schöpft ein Simulanzmittel, das eine genaue Nachbildung des Mondregoliths ist. (Bildnachweis: Joe Louca)
Die virtuelle Simulation umfasst auch „haptische“ Interaktionen. Mit anderen Worten, sie vermittelt dem Benutzer einen Tastsinn, der die taktilen Eigenschaften des Mondregoliths in der geringen Schwerkraft des Mondes nachahmt. Dadurch bekommen die Teleoperatoren ein besseres Gefühl dafür, wie viel Kraft sie aufwenden müssen, um im Regolith zu graben oder eine Probe mit einer Schaufel zu heben. Bisher wurden die haptischen Interaktionen nur in die virtuellen Versionen grundlegender Aufgaben einbezogen, wie das Eindrücken von Regolith in den Boden oder das Ziehen einer Schaufel durch den Boden, aber noch nicht für komplexere Aufgaben.
„Wir können die Stärke der Schwerkraft in diesem Modell einstellen und haptisches Feedback geben, so dass wir den Astronauten ein Gefühl dafür vermitteln können, wie sich Mondstaub unter Mondbedingungen anfühlen und verhalten würde – der ein Sechstel der Erdanziehungskraft hat“, sagte Louca.
Das System könnte auch für die Ausbildung von Astronauten verwendet werden, die eines Tages zum Mond fliegen werden, da es ihnen eine realistische Simulation dessen gibt, was sie erwartet.
„Eine Möglichkeit wäre, dass die Astronauten diese Simulation nutzen, um sich auf kommende Monderkundungsmissionen vorzubereiten“, sagte Louca.
Bevor dies jedoch geschehen kann, müssen laut Louca noch Vertrauensprobleme überwunden werden. Frühere Studien haben gezeigt, dass es eine psychologische Barriere für das Vertrauen gibt, ob das virtuelle System, das ein Benutzer bedient, in der Realität so funktioniert, wie es sollte.
Lucas Team hat die Effizienz und Vertrauenswürdigkeit ihres virtuellen Systems quantifiziert und festgestellt, dass das System beim Schöpfen von Regolith-Simulanzien in 100 % der Fälle effizient und in 92,5 % der Fälle vertrauenswürdig war. Das Ausgießen des Simulanzmittels aus der Schaufel war etwas weniger zuverlässig, aber das Team fand heraus, dass die Ausrichtung der Schaufel während des Transports des Simulanzmittels eingeschränkt werden konnte, so dass es präziser durchgeführt werden konnte.
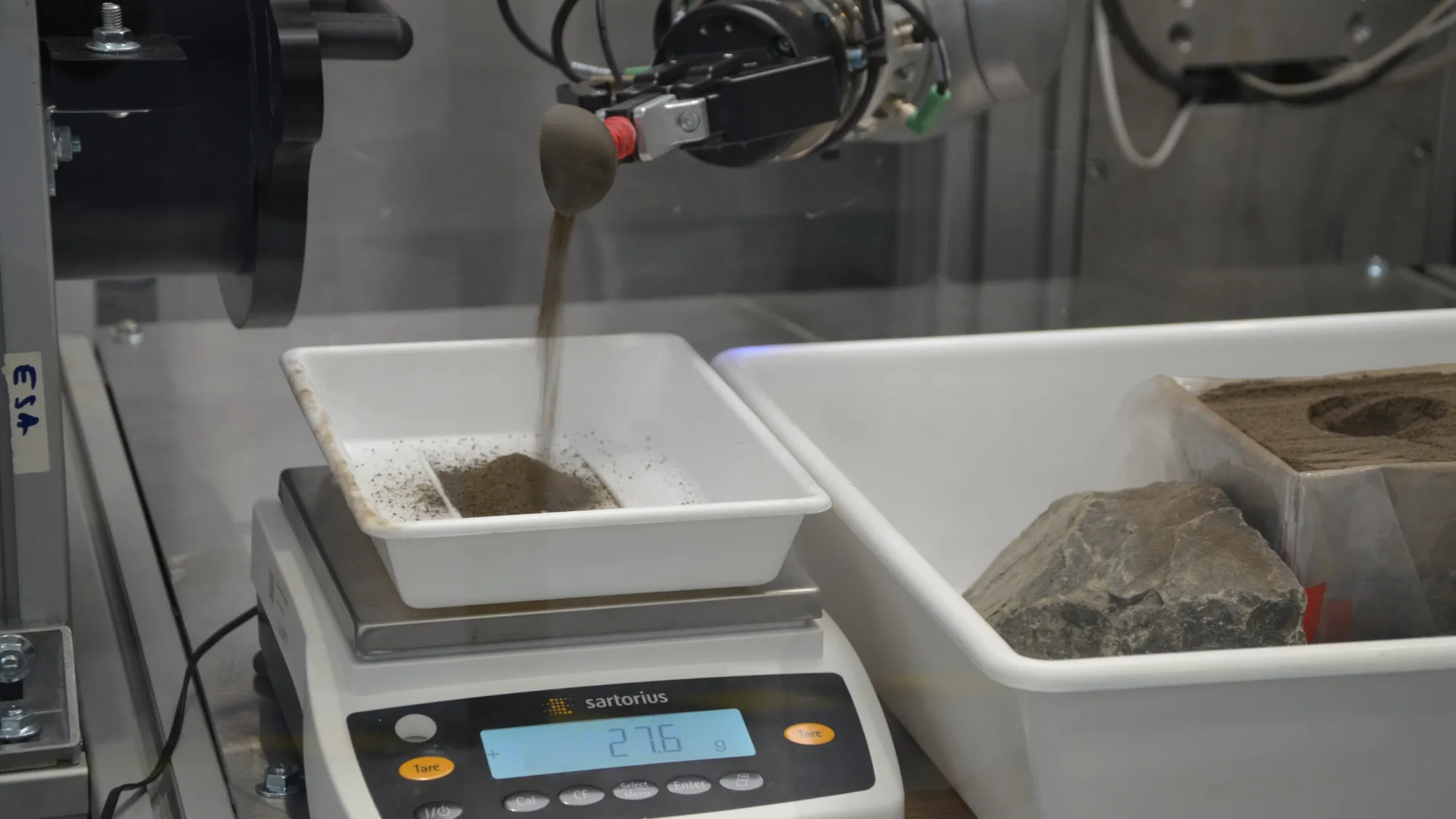
Das Ausgießen von Material aus einer Schaufel mit Hilfe der virtuellen Teleoperation erwies sich als etwas ungenauer als das eigentliche Schöpfen. (Bildnachweis: Joe Louca)
Obwohl für den Mond konzipiert, könnten dieselben Teleoperationstechniken im Prinzip auch für Missionen zum Mars eingesetzt werden. Dies könnte insbesondere für die schwierige Aufgabe hilfreich sein, Probenröhrchen von einem Rover zu bergen und sie auf ein anderes Fahrzeug zu laden, das vom Mars startet und die Proben zur Erde zurückbringt.
Da das Budget und der Zeitplan für das aktuelle Probenrückführungsprojekt der NASA außer Kontrolle geraten sind, hat die Raumfahrtbehörde die Industrie gebeten, bei der Entwicklung einer Lösung zu helfen. Rocket Lab erhielt vor kurzem den Auftrag, eine detaillierte Studie über eine mögliche Lösung für die Rückführung der Proben des Perseverance-Rovers zu erstellen, auch wenn es für die Teleoperation noch zu früh sein könnte. Andere Missionen zur Rückführung von Proben und zur Erkundung des Mondes, des Mars und anderer felsiger Körper wie Asteroiden könnten jedoch in Zukunft von der Teleoperation profitieren.
„Im nächsten Jahrzehnt wird es mehrere bemannte und unbemannte Missionen zum Mond geben, wie das Artemis-Programm der NASA und das chinesische Chang’e-Programm“, so Louca. „Diese Simulation könnte ein wertvolles Instrument für die Vorbereitung oder den Betrieb dieser Missionen sein.“