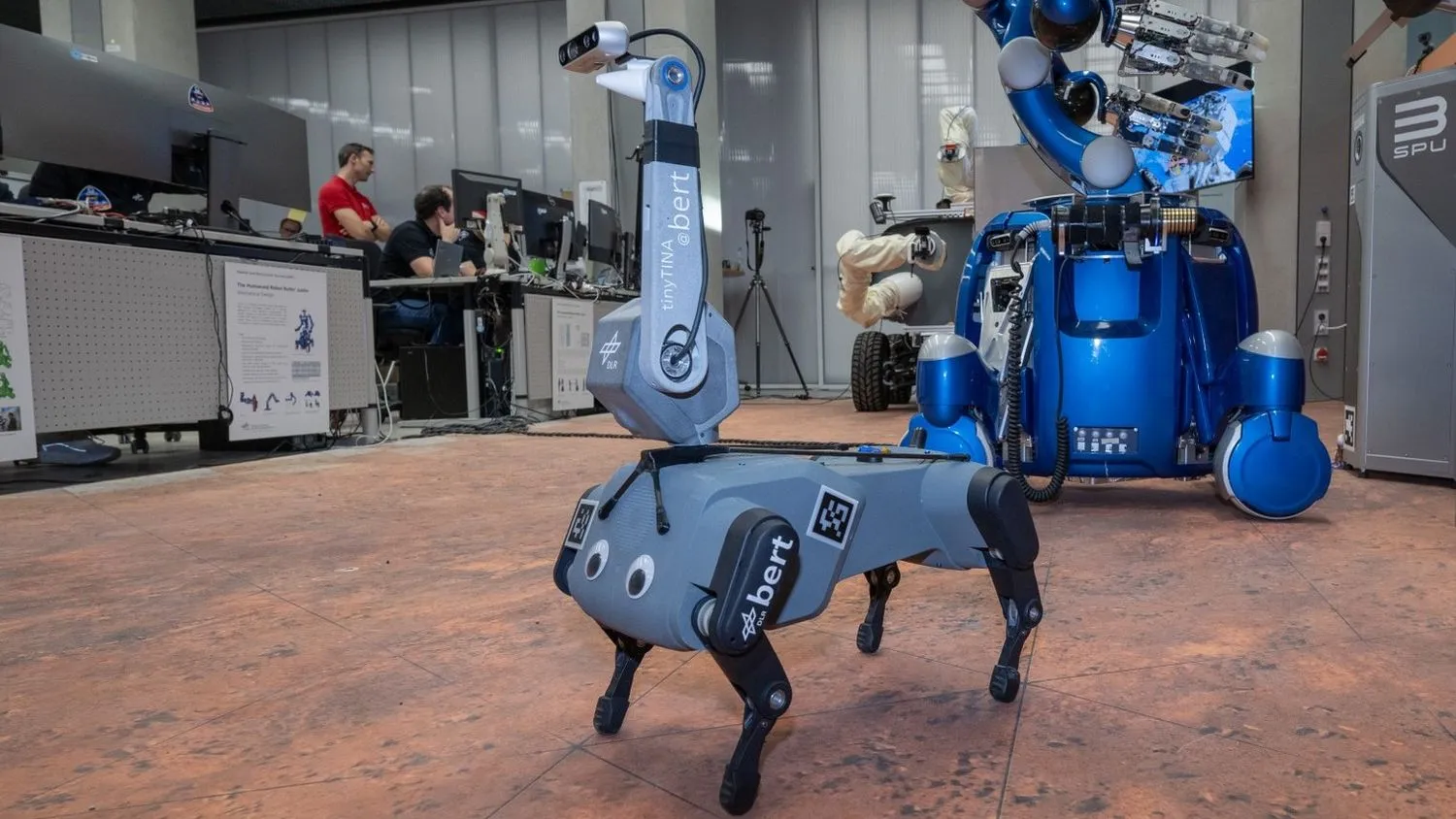
 Bert, ein vierbeiniger Roboter des Deutschen Zentrums für Luft- und Raumfahrt (DLR), erkundet im Januar 2024 einen simulierten Planeten in Deutschland unter der Kontrolle des Astronauten Marcus Wandt vom Internationalen Raumstationsprojekt der Europäischen Weltraumorganisation.(Bildnachweis: DLR (CC BY-NC-ND 3.0))
Bert, ein vierbeiniger Roboter des Deutschen Zentrums für Luft- und Raumfahrt (DLR), erkundet im Januar 2024 einen simulierten Planeten in Deutschland unter der Kontrolle des Astronauten Marcus Wandt vom Internationalen Raumstationsprojekt der Europäischen Weltraumorganisation.(Bildnachweis: DLR (CC BY-NC-ND 3.0))
Die Weltraumrobotik ist vor die Hunde gegangen.
Der Astronaut Marcus Wandt von der Internationalen Raumstation hat im Januar zum ersten Mal Bert, einen vierbeinigen Roboterkumpel, vom Weltraum aus gesteuert. Durch die Verwendung von Beinen anstelle von Rädern könnten die Roboter leichter Hügel erklimmen oder in Höhlen auf dem Mars oder anderen Welten kriechen, so der Projektleiter DLR (Deutsche Raumfahrt-Agentur) in einer kürzlich veröffentlichten Erklärung.
„Bisher wurden nur radgetriebene Roboter von Astronauten aus dem Weltraum ferngesteuert“, schreibt das DLR. „Aber Bert beherrscht mehrere Gangarten und kann dank seiner beinbasierten Fortbewegung sogar unwegsames Gelände erkunden, einschließlich kleiner Höhlen, die seine rollenden Teamkollegen nicht erreichen können.“
DLR hat jahrelang mit anderen ISS-Astronauten geübt; dieses jüngste Experiment folgte auf Arbeiten, die im Juli 2023 durchgeführt wurden, um herauszufinden, wie sich „Zeitverzögerungen auf die Steuerung von Robotern während Weltraummissionen auswirken“, heißt es in der Mitteilung.
Es dauert mehrere Minuten, um ein Signal zwischen Erde und Mars zu senden, was neue Arbeitsmethoden in dieser Umgebung erfordert. Und selbst Astronauten in der Umlaufbahn hätten leichte Zeitverzögerungen von Sekunden zwischen ihrem Weg um einen Planeten oder den Mond und Robotern auf der Oberfläche.
 Ein Team von Robotern, die von Besatzungsmitgliedern der Internationalen Raumstation gesteuert werden, im terrestrischen Marslabor des DLR in Oberpfaffenhofen (Bildnachweis: DLR)
Ein Team von Robotern, die von Besatzungsmitgliedern der Internationalen Raumstation gesteuert werden, im terrestrischen Marslabor des DLR in Oberpfaffenhofen (Bildnachweis: DLR)
Die Roboter werden im Deutschen Zentrum für Luft- und Raumfahrt in Oberpfaffenhofen, westlich von München, im Rahmen des Projekts Surface Avatar betrieben, das gemeinsam vom DLR und der Europäischen Weltraumorganisation ESA geleitet wird. (Wandt ist auch Projektastronaut bei der ESA und fliegt mit der zweiwöchigen SpaceX Ax-3 Mission, die von Axiom Space geleitet wird).
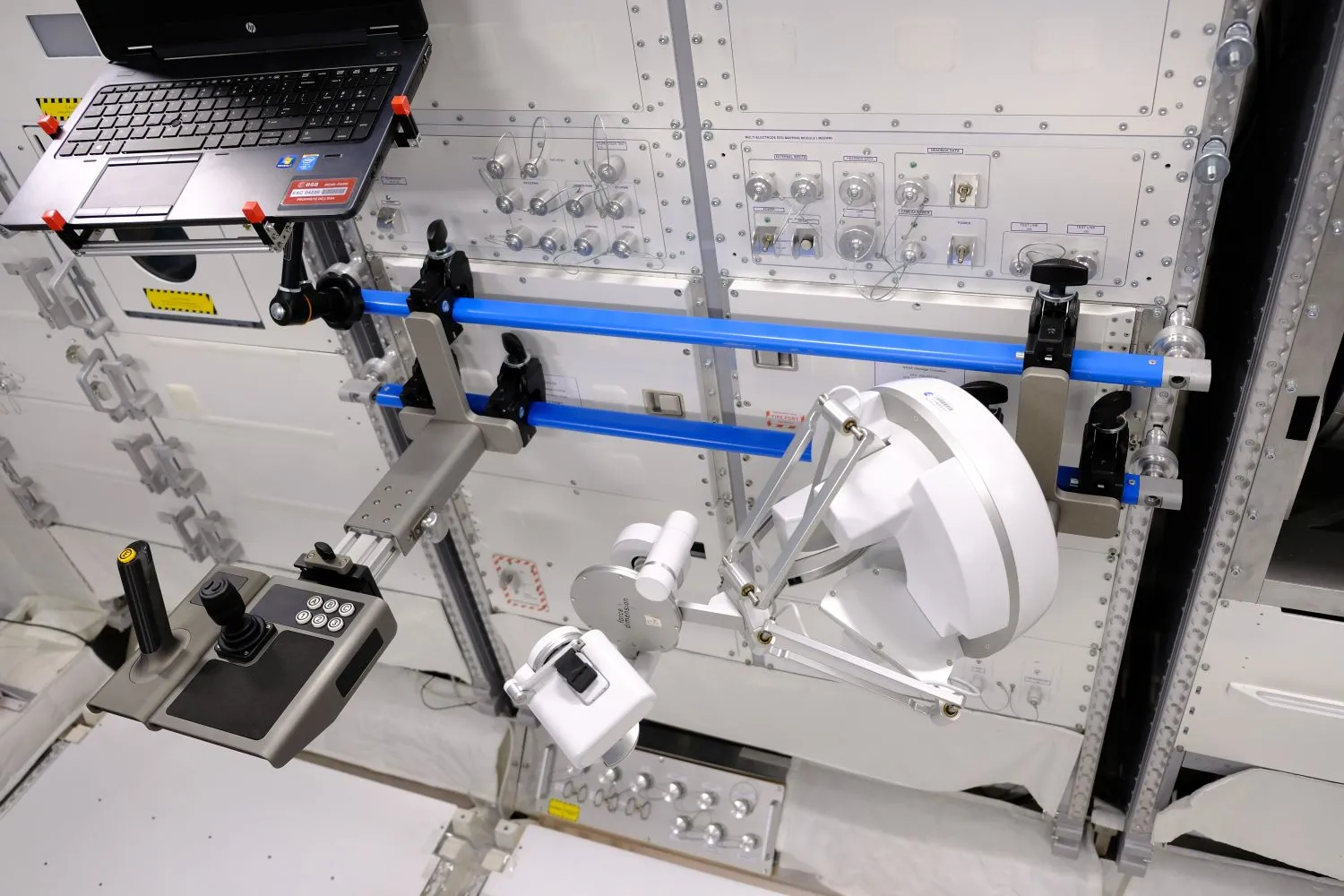 Das Robot Command Terminal für die ‚Surface Avatar‘-Experimente befindet sich im Columbus-Modul der Internationalen Raumstation ISS. Neben einem Laptop mit grafischer Benutzeroberfläche können die Roboter über zwei Eingabestationen kommandiert werden. Mit dem Sigma-Joystick (links) kann der ESA-Astronaut Marcus Wandt intuitiv die Bewegung und Blickrichtung der verschiedenen Roboter steuern. Mit dem Interaktionsgerät (rechts) kann er die Arme der Roboter so steuern, als wären es seine eigenen. (Bildnachweis: DLR)
Das Robot Command Terminal für die ‚Surface Avatar‘-Experimente befindet sich im Columbus-Modul der Internationalen Raumstation ISS. Neben einem Laptop mit grafischer Benutzeroberfläche können die Roboter über zwei Eingabestationen kommandiert werden. Mit dem Sigma-Joystick (links) kann der ESA-Astronaut Marcus Wandt intuitiv die Bewegung und Blickrichtung der verschiedenen Roboter steuern. Mit dem Interaktionsgerät (rechts) kann er die Arme der Roboter so steuern, als wären es seine eigenen. (Bildnachweis: DLR)
Wandt, so die DLR-Verantwortlichen, „ließ seinen vierbeinigen Freund die Umgebung des Labors selbstständig erkunden und das Terrain mit seinen Kameraaugen überwachen.“ Mit von der Partie waren auch der humanoide Roboter Rollin‘ Justin, der sich auf Rädern fortbewegt, sowie der Interact Rover der ESA. Die Gruppe arbeitete zusammen, um erfolgreich ein kurzes Rohr zu installieren, das stellvertretend für ein mögliches wissenschaftliches Messgerät der Zukunft steht.
 Marcus Wandt, Projektastronaut der Europäischen Weltraumorganisation (ESA) auf der Ax-3-Mission von Axiom Space, kontrolliert Roboter in Deutschland, während er sich im Januar 2024 auf der Internationalen Raumstation befindet. (Bildnachweis: ESA/Andreas Mogensen/X)
Marcus Wandt, Projektastronaut der Europäischen Weltraumorganisation (ESA) auf der Ax-3-Mission von Axiom Space, kontrolliert Roboter in Deutschland, während er sich im Januar 2024 auf der Internationalen Raumstation befindet. (Bildnachweis: ESA/Andreas Mogensen/X)
ESA arbeitet im Rahmen des von der NASA geleiteten Artemis-Programms daran, in den späten 2020er Jahren Astronauten auf die Mondoberfläche zu schicken, und zwar im Rahmen des internationalen Artemis-Abkommens, das darauf abzielt, eines Tages eine Mondbasis und eine ständige Präsenz am Südpol des Mondes zu errichten (in der Nähe von Wasservorkommen, die für Raketentreibstoff, Lebenserhaltung und andere Weltraumbedürfnisse hilfreich sein könnten, so die NASA). Die Raumfahrtbehörden haben betont, dass Artemis auch ein wertvolles Testgelände für den Transport von Astronauten zum Mars in den kommenden Jahrzehnten sein wird.
Roboter durchlaufen oft eine jahrzehntelange Entwicklungsphase, bevor sie für den Weltraum vorbereitet werden, und selbst diejenigen, die dort eingesetzt werden, sind oft experimenteller Natur. Dennoch könnten Roboter, die mit dem DLR oder auf der Mondoberfläche arbeiten, eines Tages für eine tatsächliche Mission zum Roten Planeten eingesetzt werden, wenn die Technologie nach all den Tests Bestand hat.